About The Project
This project involves interfacing an ultrasonic sensor with a servo motor to measure and display distances at various angles. The system rotates the sensor across a 180-degree range, providing real-time distance readings for enhanced spatial awareness and measurement applications.
Real World Applications of the Project
- Robotics and Automation: It can be used in robotic systems to enable obstacle detection and avoidance, allowing robots to navigate safely in their environment.
- Security Systems: The system can be integrated into surveillance and security systems to monitor a wide area for intrusions or to detect objects moving within a specific range.
- Mapping and Navigation: The setup can be utilized in applications requiring environment mapping, such as in drones or autonomous vehicles, to create a 2D map of the surroundings based on distance measurements.
Ultrasonic Sensor (HC-SR04)

The working principle of an ultrasonic distance sensor is based on the echo of high-frequency sound (Ultrasonic Sound)waves.
- Sound Wave Emission: The sensor emits short pulses of ultrasonic sound waves (typically above the range of human hearing, around 40 kHz).
- Travel to Object: These sound waves travel through the air and bounce off any obstacle or object in their path.
- Echo Reception: The sensor then listens for the echoes of the sound waves reflected back from the object.
Time Calculation : By measuring the time interval between sending the sound pulse and receiving its echo, the Arduino Uno calculates the distance to the object using the formula: Distance = Speed of Sound ×Time interval between sending the sound pulse and receiving its echo/2.
Speed of Sound: The speed of sound wave in air is approximately 343 meters per second .
That is
Distance in meter = 171.5 ×Time interval between sending the sound pulse and receiving its echo in second.
Servo Motor
A servo motor is a type of motor where precise control of angular position is required.
- A servo motor receives a PWM (Pulse Width Modulation) signal on its control wire.
- The width of the pulse determines the position of the servo horn (output shaft).

- Input Signal (PWM): The control circuit receives a PWM (Pulse Width Modulation) signal, which dictates the desired position of the servo.
- Pulse Width: The length of the pulse determines the angle:
- 1 ms pulse width: Typically corresponds to 0 degrees.
- 1.5 ms pulse width: Corresponds to 90 degrees (midpoint).
- 2 ms pulse width: Corresponds to 180 degrees.
- The pulse width is sent every 20 ms in a 50 Hz (meaning the pulse is repeated every 20 ms) signal.
- Pulse Width: The length of the pulse determines the angle:
However, Arduino programming with a servo motor is straightforward, the servo motor’s position is determined by a value ranging from 0 to 180 degrees
The Servo.h library, handles the conversion of the angle value to a PWM signal with the appropriate duty cycle and frequency, controlling the servo motor’s position.
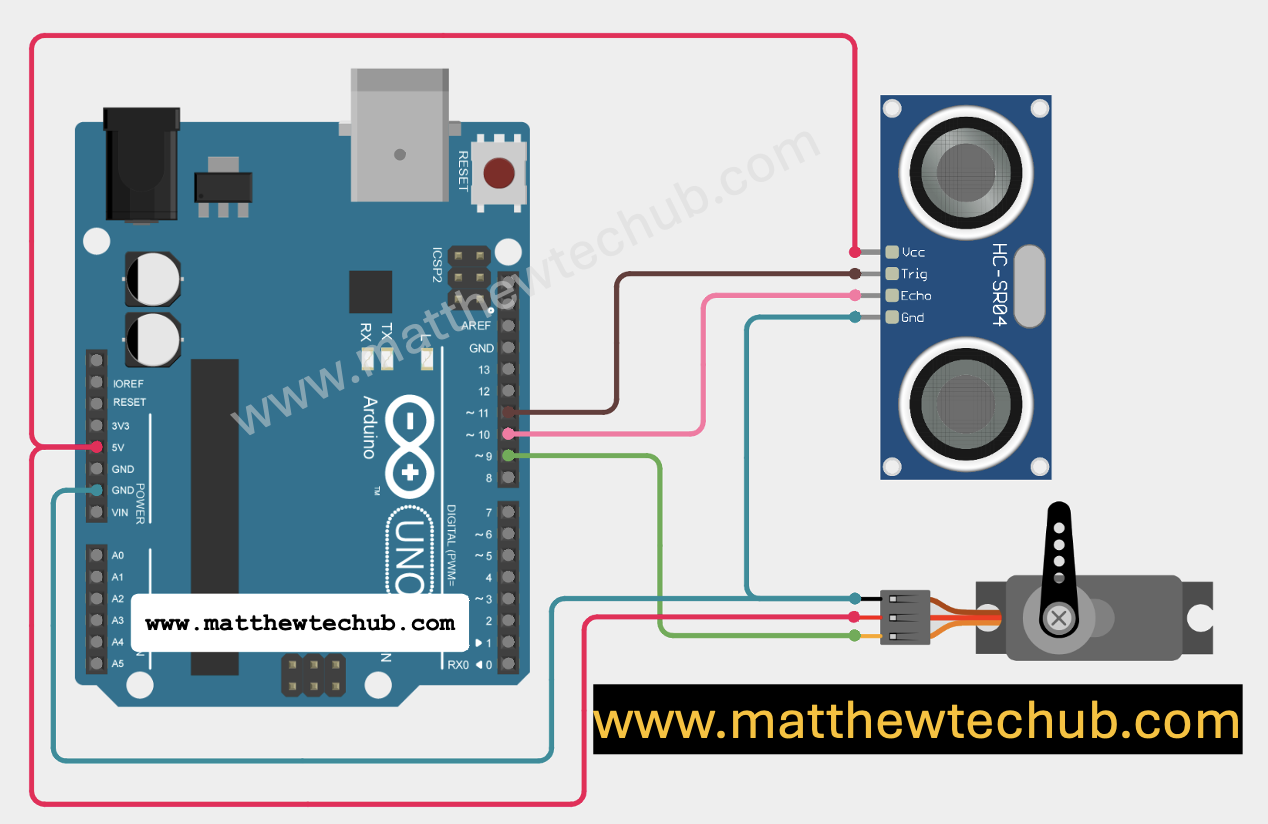
Circuit Wiring
Program Code
This Arduino code interfaces a servo motor with an ultrasonic sensor to measure the distance to objects at different angles. The setup continuously sweeps the servo motor from 0 to 180 degrees and then back to 0 degrees while measuring the distance using the ultrasonic sensor at each step. The results (angle and distance) are printed on the Serial Monitor.
// www.matthewtechub.com
// servomotor -Ultra Sonic Sensor
#include <Servo.h>
Servo myServo; // Create a servo object
// Define pins for ultrasonic sensor
const int trigPin = 11;
const int echoPin = 10;
// Variable to store distance
long duration;
int distance;
void setup() {
myServo.attach(9); // Attach the servo to pin 9
pinMode(trigPin, OUTPUT); // Set the trigPin as an output
pinMode(echoPin, INPUT); // Set the echoPin as an input
Serial.begin(9600); // Start the serial communication for debugging
// Initial test to move the servo
myServo.write(0); // Move servo to 0 degrees
delay(1000); // Wait for 1 second
myServo.write(90); // Move servo to 90 degrees
delay(1000); // Wait for 1 second
myServo.write(180);// Move servo to 180 degrees
delay(1000); // Wait for 1 second
}
void loop() {
for (int angle = 0; angle <= 180; angle += 5) { // Sweep from 0 to 180 degrees in 15-degree steps
myServo.write(angle); // Move the servo to the current angle
delay(500); // Wait for the servo to reach the position
// Send a 10us pulse to trigger the ultrasonic sensor
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the echoPin to get the duration of the pulse
duration = pulseIn(echoPin, HIGH);
// Calculate the distance in centimeters
distance = duration * 0.034 / 2;
// Print the distance and the angle
Serial.print("Angle: ");
Serial.print(angle);
Serial.print(" degrees, Distance: ");
Serial.print(distance);
Serial.println(" cm");
delay(500); // Short delay between readings
}
// Return the servo to the initial position
for (int angle = 180; angle >= 0; angle -= 5) { // Sweep back from 180 to 0 degrees
myServo.write(angle); // Move the servo to the current angle
delay(500); // Wait for the servo to reach the position
// Send a 10us pulse to trigger the ultrasonic sensor
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Read the echoPin to get the duration of the pulse
duration = pulseIn(echoPin, HIGH);
// Calculate the distance in centimeters
distance = duration * 0.034 / 2;
// Print the distance and the angle
Serial.print("Angle: ");
Serial.print(angle);
Serial.print(" degrees, Distance: ");
Serial.print(distance);
Serial.println(" cm");
delay(500); // Short delay between readings
}
}
Code Explanation
#include <Servo.h>- The `Servo` library is included to control the servo motor. This library simplifies the process of controlling servo motors with an Arduino.
Servo myServo;- An object `myServo` of the `Servo` class is created. This object will be used to control the servo motor.
const int trigPin = 11;
const int echoPin = 10;
- `trigPin`: The pin connected to the trigger pin of the ultrasonic sensor (used to send out a pulse).
- `echoPin`: The pin connected to the echo pin of the ultrasonic sensor (used to receive the reflected pulse).
long duration;
int distance;
- `duration`: Stores the time taken by the ultrasonic pulse to travel to the object and back.
- `distance`: Stores the calculated distance to the object in centimetres.
void setup() {
myServo.attach(9);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
- `myServo.attach(9)`: Attaches the servo motor to pin 9.
- `pinMode(trigPin, OUTPUT)`: Sets `trigPin` as an output, used to send out the ultrasonic pulse.
- `pinMode(echoPin, INPUT)`: Sets `echoPin` as an input, used to receive the reflected pulse.
- `Serial.begin(9600)`: Initializes serial communication at a baud rate of 9600 for debugging purposes.
- The servo motor is initially tested by moving it to 0°, 90°, and 180° positions with 1-second delays between movements.
void loop() {
for (int angle = 0; angle <= 180; angle += 5) {
myServo.write(angle);
delay(500);
- The servo motor sweeps from 0° to 180° in 5-degree increments. The `delay(500)` allows the servo time to reach each position.
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
- A 10-microsecond pulse is sent through `trigPin` to initiate the ultrasonic sensor. This pulse triggers the sensor to send out a sound wave.
duration = pulseIn(echoPin, HIGH);- The `pulseIn()` function measures the time it takes for the reflected sound wave to return to the sensor. This time is stored in `duration`.
distance = duration * 0.034 / 2;- The distance to the object is calculated based on the time taken by the pulse. The speed of sound is approximately 0.034 cm/µs, and since the pulse travels to the object and back, the time is divided by 2.
Serial.print("Angle: ");
Serial.print(angle);
Serial.print(" degrees, Distance: ");
Serial.print(distance);
Serial.println(" cm");
- The angle and corresponding distance are printed to the Serial Monitor.
for (int angle = 180; angle >= 0; angle -= 5) {
myServo.write(angle);
delay(500);
- The servo motor sweeps back from 180° to 0°, repeating the process of measuring and displaying the distance.
Summary:
- The servo motor continuously rotates from 0° to 180° and back, while the ultrasonic sensor measures the distance to objects at each angle.
- The system calculates the distance based on the time it takes for the sound wave to return after hitting an object.
- The distance and the angle are displayed on the Serial Monitor, providing real-time data on the object’s distance at various angles.
- This setup can be used for applications such as scanning an area to detect obstacles, mapping environments, or as part of a more complex robotic system.